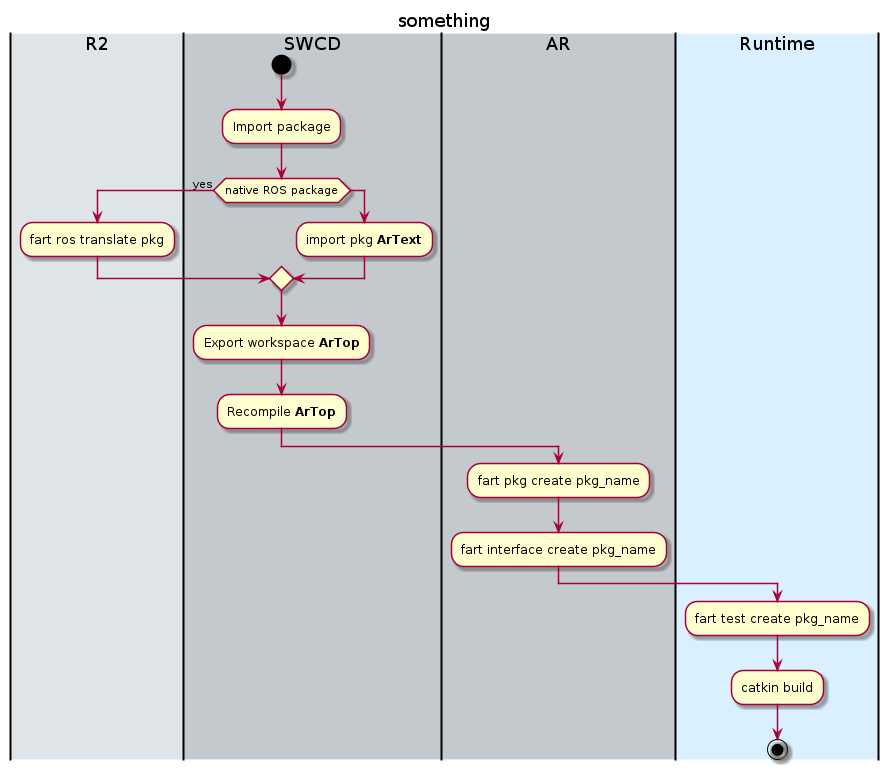
Workflow
Contents
Command line interface
fart --ros-workspace `ros_dev_ws` --artop-workspace `artop_dev_ws` --autosar `autosar`
fart interface packages # list of packages that provide interfaces
fart interface package pkg_name # list of available interface types within one package
fart interface create pkg_name # create empty package in the workspace
fart rte create pkg_name # greate ROS nodes for AUTOSAR runnables
fart test create pkg_name # create tests for component application
fart pkg create pkg_name # Create a new ROS 2 package
fart pkg list # list of available packages
# Interface with ROS interfaces
fart ros translate `ros_pkg` # Translate ROS package to SWCD interfaces
fart ar
Model transformation pipeline
Export and Recompile SWCD package
java -jar /opt/artext-demo/artext-compiler-1.5.1-SNAPSHOT.jar \
-ar Autosar40 -outputFile autosar_compiled/Calculator.arxml \
examples/Calculator/Calculator.swcd
Integrate ROS interfaces
Discover ROS interfaces
ros2 interface packages
action_msgs
action_tutorials_interfaces
actionlib_msgs
builtin_interfaces
composition_interfaces
diagnostic_msgs
...
fart -a /tmp/workspace ros translate example_interfaces